АЖБУКА
Продольная устойчивость автожира - один из ключевых вопросов, в которых пилоты и строители аппаратов должны хорошо ориентироваться. Поскольку внятной информации об этом применительно к легким автожирам на русском языке пока нет, мы постараемся по возможности заполнить этот вакуум. Кое-где, если это не имело принципиального значения, мы пока вставляли готовые картинки самолета или вертолета - чтобы сэкономить время и успеть побольше рассказать вам.
Самые простые вещи
Основным уравнением движения любого летательного аппарата является уравнение сил, действующих на аппарат. В продольной плоскости на автожир действуют четыре основные силы: сила тяжести, тяга маршевого винта, полная тяга ротора и сила сопротивления фюзеляжа. Если изобразить эти силы графически, то получится вот такая картина.
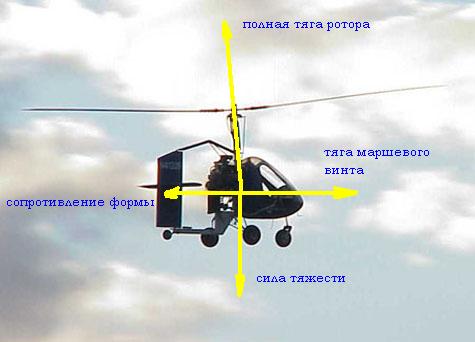 Рис. 01. Четыре основных силы, воздействующие на летательный аппарат в
полете
Рис. 01. Четыре основных силы, воздействующие на летательный аппарат в
полете
По правилу сложения векторов и первому закону Ньютона, если равнодействующая этих четырех сил равна нулю, аппарат будет двигаться равномерно и прямолинейно (горизонтально).
Нарушение равновесия приводит к возникновению ускорения. К примеру, уменьшение силы тяжести (при выработке топлива в полете) вызовет подъем аппарата. Увеличение тяги маршевого винта вызовет увеличение скорости летательного аппарата до тех пор, пока возрастающее сопротивление фюзеляжа не уравновесит тягу. Тогда аппарат снова будет двигаться с постоянной скоростью.
Полная тяга ротора может быть представлена как сумма двух сил или составляющих: вертикальной (подъемная сила) и горизонтальной (сопротивление ротора). Если полная тяга не изменяется по величине, она может изменяться по направлению, при этом изменяются значения вертикальной и горизонтальной составляющих. К примеру, при взятии ручки на себя ротор отклоняется назад, его собственное сопротивление увеличивается, а подъемная сила уменьшается. Если тяга маршевого винта при этом остается неизменной, аппарат снизит скорость и начнет снижаться.
Все эти моменты будут рассмотрены здесь позднее гораздо более подробно, а сегодня наша задача - рассмотреть особенности продольной устойчивости автожира в полете. Мы также рассмотрим, какие опасности могут возникать в полете и каковы в этом смысле преимущества и недостатки автожиров разной конфигурации.
Если автожир движется в воздушном пространстве в установившемся режиме, без постороннего воздействия с ним ничего не происходит. Посторонним воздействием могут быть: действия пилота, изменения работы двигателя и движения воздуха (порывы ветра, турбулентность, восходящие и нисходящие потоки).
При этом ускорение или торможение аппарата сами по себе не представляют проблем, но существует еще одна степень свободы летательного аппарата - он может под действием различных сил поворачиваться относительно своего центра масс. На этом принципе построено управление легким автожиром, этот же принцип может стать причиной неприятностей в случае недостатков в конструкции или неадекватных действий пилота. Здесь мы будем рассматривать только возможность автожира проворачиваться в продольной плоскости - опуская нос (на пикирование) или поднимая его (на кабрирование).
На рис. 01 четыре основных силы приложены к центру масс аппарата (ЦТ), но реально все обстоит несколько иначе. Вектор тяги маршевого винта может проходить выше или ниже центра масс, но эта разница по высоте остается в полете постоянной. Сопротивление фюзеляжа складывается из сопротивлений отдельных элементов конструкции и на рис.01 сумма этих отдельных векторов представлена как одна сила. Она тоже может проходить в стороне от ЦТ. К тому же, вектор тяги маршевого винта всегда направлен под одним углом к строительной оси фюзеляжа. Это не обязательно всегда так, есть нюансы, которые мы пока для простоты опускаем. Такие же упрощения, облегчающие понимание, будут сделаны и дальше в отношении других величин и значений. В частности, для простоты мы будем пока считать, что вектор сопротивления фюзеляжа направлен параллельно движению аппарата в воздухе. Обратите внимание: 1) это направление вовсе не обязательно параллельно строительной (продольной) оси аппарата (например, на осевом парашютировании оно практически перпендикулярно продольной оси автожира) и 2) суммарный вектор сопротивления фюзеляжа вовсе не обязательно проходит через ЦТ аппарата. Это важно и будет использовано дальше.
С силой тяжести проще: ее всегда (тоже, правда, слегка упрощаем :) можно представить как единую силу (вес автожира) и проходит она через ЦТ.
А с ротором, как раз, сложнее, поскольку он может изменять угол своего наклона относительно аппарата. Может изменяться и угол, под которым воздушный поток входит в ротор - угол атаки. Полная тяга ротора всегда перпендикулярна плоскости вращения ротора (строго говоря, это не совсем так, но для нашей темы можно принять ее перпендикулярной), поэтому при изменении его наклона полная тяга может остаться постоянной по величине, но меняться по направлению, а сопротивление ротора (Сх) и подъемная сила (Су) будут меняться и по величине и по направлению. При этом изменение наклона ротора вызывает еще и изменение взаимного расположения ЦТ и вектора полной тяги ротора: он может приближаться или удаляться от ЦТ, может проходить через него.
Для простоты рассмотрим прямолинейный горизонтальный полет с установившейся скоростью.
Нетрудно видеть, что в данном примере тяга маршевого винта, сопротивление фюзеляжа и сопротивление ротора действуют на автожир горизонтально, и их сумма равна нулю. Сила тяжести и подъемная сила уравновешивают друга в вертикальном направлении.
Заметили? Вместо первоначальных четырех основных сил мы уже рассматриваем пять! И вот почему: сопротивление ротора, играющее значительную роль в нашей теории, уж точно проходит мимо ЦТ, и значительно выше его. Изменение этой величины может оказать важное воздействие на вращение автожира вокруг своей оси. Поэтому мы сразу выделяем его в отдельную составляющую уравнения движения АЖ. Но, раз уж мы заговорили о вращении, необходимо сказать еще пару слов о моментах сил (освежим школьную программу).
Момент силы - это сила, умноженная на плечо, на котором она приложена относительно оси вращения.
Чем больше момент, тем энергичнее вращение. Если на вращение оказывают воздействие несколько сил, то их можно разделить на две группы, стремящиеся вращать тело в противоположные стороны. Эти две группы называют парой моментов. Если они взаимно уравновешивают друг друга, тело не начнет вращаться.
Момент равен произведению силы на плечо, поэтому небольшая сила на большом плече может уравновесить большую силу, приложенную к маленькому плечу. Вспомните об этом, когда мы будем говорить, например, об эффективности горизонтальных стабилизаторов.
В отличие от суммы сил, представленных на рис. 01, разница в паре моментов необходима даже для равномерного вращения. При равенстве моментов тело не будет вращаться!
Ну вот, мы слегка освежили в памяти основы, теперь можно вернуться к автожирам, точнее, к вопросам безопасности автожиров разных схем.
Начиная с Бенсена, большинство автожиров строились приблизительно по одной схеме, при которой ось маршевого винта проходила заметно выше центра тяжести аппарата с пилотом. И уже при Бенсене случались катастрофы, которые свидетели описывали, как взрыв аппарата в воздухе, хотя взрываться там нечему. Внезапно аппарат разлетался на части, пилот при этом, как правило, уже не мог ничего рассказать о причинах или хотя бы о том, что предшествовало беде. Таких случаев было не так уж много, но их было достаточно, чтобы посеять недоверие к автожиру.
Не вдаваясь (пока, пока!) в подробности, скажем, что причиной большинства таких историй было явление, называемое PPO (Powered Push-Over - дословно: "переворот, вызванный мощностью"). Мы называем это "силовой кувырок" или просто кувырок.
Через некоторое время, проанализировав динамику, объяснение загадочным катастрофам было найдено. В полете сопротивление автожира движению складывается из двух основных составляющих: сопротивление фюзеляжа и сопротивление ротора. Первое при постоянной скорости почти неизменно и зависит только от формы фюзеляжа и его обтекаемости. Сопротивление ротора зависит от его угла атаки и загрузки ротора. В режиме самовращения (в котором постоянно находится ротор автожира) нагрузку на ротор могут дать две силы: вес летательного аппарата и тяга маршевого винта. Самовращение возможно только при условии, что через ротор снизу вверх прокачивается воздух, при этом часть затраченной энергии расходуется на вращение ротора, а часть - на создание подъемной силы. В моторном полете сила тяжести и тяга винта работают вместе, если останавливается двигатель, то сила тяжести тянет аппарат к земле, продолжая вращать ротор. А что происходит, если в какой-то момент исчезает сила тяжести? Такое возможно, например, если в наборе высоты энергично отдать ручку от себя, переводя аппарата на снижение. При энергичном маневре на спортивных самолетах в этом случае возникает даже отрицательная перегрузка, т.е. аппарат не притягивается к земле, а наоборот, удаляется от нее. На автожире при этом поток воздуха перестает идти через ротор снизу вверх, и - исчезает сила, вращающая ротор. За счет сопротивления вращению ротор довольно быстро теряет обороты, вместе с ними теряется его полная тяга и, соответственно, ее составная часть - сила сопротивления. Если посмотреть на рисунок, то даже без расчетов можно видеть, что вектор тяги у автожира Бенсена находится заметно выше ЦТ аппарата. В полете тяга винта стремится опустить нос аппарата вниз. Сила сопротивления ротора компенсирует эту неприятность, удерживая аппарат горизонтально. Так вот, если сопротивление ротора вдруг исчезнет, то маршевый винт быстро опрокинет аппарат вперед. Это и есть РРО или силовой кувырок. Несложный расчет покажет, что такой кувырок происходит очень быстро - на легком аппарате меньше, чем за секунду! Здесь вы можете посмотреть, как это происходит. Аппарат, изображенный в этой анимации не случайно "напоминает РАФ2000". Больше всего печальных случаев с РРО произошло на автожирах Бенсена и - на стандартном РАФ2000 (без горизонтального стабилизатора).
Следующие вопросы - в каких еще случаях возможен силовой кувырок и какими средствами его можно избежать.
Основные возможные причины внезапной разгрузки ротора - 1) энергичная отдача ручки управления от себя, 2) сильный нисходящий поток воздуха и 3)...высокая скорость аппарата. Про дачу ручки от себя мы уже сказали. Мощный нисходящий поток - явление редкое, но встречающееся. Мне известен случай, когда многотонный вертолет Ми-8 с высоты 300 м был снесен нисходящим потоком до самой земли - экипаж ничего не смог противопоставить. Другое дело, что сильный поток не случается сразу и вдруг - на подлете к зоне сильной турбулентности пилот почувствует ее усиление - и должен будет принять правильное решение. Высокая скорость - отдельная история, связанная с тем, что с увеличением скорости угол атаки ротора уменьшается, т.е. он больше отклоняется вперед и плоскость вращения приближается к линии полета. Таким образом, один и тот же кивок аппарата, скажем, на 5 градусов по тангажу носом вниз пройдет незамеченным на малой скорости, а на большой может привести к тому, что ротор нырнет под поток, т.е. тоже - разгрузится. Со всеми вытекающими.
Об этом давайте попозже, т.к. вы уже, наверное, устали.
Скажем только несколько слов о способах предохранения от РРО.
До появления высокопрофильных автожиров учебники для пилотов давали одну простую рекомендацию: не летать в сильную турбулентность, не гонять на большой скорости, а уж если случилось - тут же выключить двигатель (исчезнет тяга винта, создающая переворачивающий момент) и взять ручку на себя, загружая ротор встречным потоком. Некоторые источники напротив рекомендовали задержать ручку в среднем положении - чтобы не срубить хвост аппарата отклоненным назад ротором. Вряд ли эти рекомендации сильно помогли некоторым пилотам - при интенсивном РРО просто не хватит времени реакции.
Высокопрофильные автожиры, т.е. такие, у которых ЦТ расположен достаточно высоко, чтобы быть близко к оси маршевого винта, решают проблему РРО радикально: поскольку ось винта проходит через ЦТ, опрокидывающий момент от винта просто отсутствует. Подробнее об этом тоже позже.
Промежуточным решением между высоким профилем и "плохим" низкопрофильным АЖ является наличие эффективного хвостового горизонтального стабилизатора. Когда стало понятно, что от фирмы РАФ стабилизатора не дождешься, в США, Австралии, Новой Зеландии и Канаде появились несколько моделей стабилизаторов для РАФ2000, которые значительно повысили безопасность полетов, хотя и не решили ее для этих машин радикально.
Стабилизатор в данном случае дословно оправдывает свое название. Если он стоит в хвосте автожира параллельно воздушному потоку (внимание - это очередное упрощение!), то при любом отклонении аппарата от линии воздушного потока стабилизатор создает момент, стремящийся вернуть машину назад. При этом, чем энергичнее отклонение аппарата, тем больше восстанавливающий момент на стабилизаторе. Понятно, что стабилизатор должен быть сзади - если бы он стоял в носу аппарата, то наоборот усиливал бы отклонение. Понятно и то, что эффективность стабилизатора в нашем случае пропорциональна его площади и расстоянию (плечу) от центра тяжести. Ну и, конечно, свою роль играет аэродинамическая форма стабилизатора, хотя это даже не самое главное (но и не безразличное!). Размеры, конструкция и расположение стабилизатора - вечный компромисс между весом, ценой и эффективностью, в каждом случае требует анализа и расчета. Цельноповоротное хвостовое оперение, уже известное многим по аппаратам класса "Доминатор", дополнительно выигрывает, поскольку находится в потоке от винта, работая еще более эффективно.
Самые язвительные уже, наверное, догадались, к чему мы так плавно приплыли к концу сегодняшнего разговора :)
Конечно, и я не боюсь в этом признаться, - к нашему "Чижику", т.е. автожиру Spinus или SparrowHawk. Я учился летать на "Доминаторе" и люблю этот аппарат по-прежнему. Но возраст располагает к покою, а на открытой табуретке зимой покоя не будет. Если полетать вокруг фазенды друга, или снимать с воздуха авторалли - тут "Домин" ничем не заменишь. А вот если зимой лететь куда за 300 верст - хочется кабину. Несколько лет на вопросы о кабинном автожире нам приходилось разводить руками. Теперь мы знаем, что ответить. Spinus благодаря своей правильной конфигурации сочетает присущие "Домину" отличные летные характеристики, устойчивость и управляемость с обеспеченной безопасностью. Теперь имеем право добавить - с комфортом закрытой кабины. Сбылась мечта идиота.
Заявление в профком: Прошу не считать это рекламным материалом, т.к. на самом деле главная цель статьи - все же объяснить неочевидные проблемы автожиров и способы их решения. В частности, природу РРО в нашей стране правильно понимают на сегодня, наверное, человек десять, не больше. Остальные по незнанию или упрямству проектируют и строят АЖ с вектором тяги маршевого винта значительно выше ЦТ. Примерами таких конструкций являются АЖ, построенный в Ессентуках, машины из Ангарска и АЖ Ю.Шевченко в Москве. Летать-то на них в принципе как-то можно, но опасность РРО на таких аппаратах высока и в какой-то момент может привести (в особенности малоопытного пилота) к печальным результатам.
В продолжение темы: несколько лет назад в журнале Rotorcraft была опубликована статья Жана Фуркада о продольной устойчивости автожира. Думаю, она будет хорошим продолжением нашей беседы. Я несколько раз садился переводить эту статью, но не мог заставить себя писать в стиле Фуркада. В результате статья все же как-то была переведена, но претерпела сильные изменения по содержанию и форме. Надеюсь, не в худшую сторону.
Jean Fourcade работает во французском аэрокосмическом агентстве и занимается расчетами траекторий спутников. В течение пяти лет он летал на автожирах на юго-востоке Франции и изучение механики и аэродинамики полета автожира является его хобби.
Longitudinal Stability of Gyroplanes
ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ АВТОЖИРОВ
Продольная устойчивость автожира всегда была предметом активных дебатов среди пилотов. Известные явления, такие как ПРОДОЛЬНАЯ РАСКАЧКА, СПРОВОЦИРОВАННАЯ ПИЛОТОМ (Pilot Induced Oscillation или PIO) и СИЛОВОЙ КУВЫРОК (Power Push Over или PPO), обсуждались в нескольких статьях журнала "Rotorcraft" а также в некоторых классических книгах об автожирах. Однако лишь недавно в университете Глазго были проведены полные математические изыскания этой проблемы. Эта работа была выполнена на средства UK Civil Aviation Authority (британские авиационные власти, аналог нашей ГСГА) и состояли в параметрическом изучении продольной устойчивости автожира.
Полученное заключение гласит, что "продольная устойчивость автожира значительно зависит от широкого спектра конструктивных характеристик".
"Однако, особо было указано значение вертикального расположения вектора тяги маршевого винта относительно центра масс. В зависимости от взаимного расположения этих элементов, возможны как устойчивые, так и неустойчивые конфигурации"
Полное исследование продольной устойчивости автожира выходит за рамки этой статьи. Некоторые простые объяснения тем не менее могут быть показаны здесь, делая доступными и понятными основные принципы устойчивости и их влияние на конструирование автожира.
Существуют два пути изучения устойчивости в авиации: статический и динамический.
Статическая устойчивость, как следует из названия, не рассматривает вопросы масс и инерций летательного аппарата. Это всего лишь геометрический критерий.
Динамическая устойчивость наиболее полно изучает вопросы устойчивости, но, в то же время, является и наиболее сложным предметом. Ее изучение требует написания уравнений движения сбалансированного летательного аппарата, а затем - рассмотрения, как ЛА реагирует на внешнее воздействие (турбулентность, например).
Динамическая устойчивость автожиров не отличается принципиально от динамической устойчивости других видов ЛА. Также, как для вертолетов и самолетов, здесь существуют два основных вида колебаний: короткопериодный и длиннопериодный (фугоидный). В первом случае подразумевается изменение тангажа при относительно постоянной скорости, во втором - изменение тангажа при относительно постоянном угле атаки.
Отличие от других ЛА (даже вертолетов) состоит в том, что у АЖ есть еще одна степень свободы - вращающийся с переменными оборотами ротор. Можно показать, что существует зависимость между оборотами ротора и фугоидными колебаниями, что может вызывать проблемы с устойчивостью и управляемостью аппарата.
Целью данной статьи является рассмотрение только статической устойчивости автожира, что можно сделать без сложных математических выкладок. Большую роль в данном вопросе играет правильное расположение ЦТ относительно сил, влияющих на продольное движение аппарата.
Что же подразумевается под определением статической устойчивости?.
В инженерной науке принято при рассмотрении устойчивости системы относительно какого-либо параметра изображать такую зависимость в виде графика, на котором параметр отображается по оси х, а по оси у отображается вызванное изменением параметра ускорение (или аналогичная величина), появляющееся у системы.
Продольное движение АЖ описывается пятью параметрами: воздушная скорость, угол атаки фюзеляжа, тангаж, угловая скорость по тангажу и обороты ротора. Можно рассмотреть статическую устойчивость как функцию каждого из этих параметров.
В этой статье мы рассмотрим в качестве параметра только угол атаки, который является для АЖ одним из наиболее важных.
Изменение продольного положения автожира (тангажа) зависит только от сил, действующих в продольной плоскости. Поэтому в качестве параметра мы возьмем угол атаки, а по оси у изобразим момент по тангажу и рассмотрим, как он изменяется.
Договоримся, что положительный тангаж будет означать нос аппарата, поднятый вверх. Соответственно, момент на кабрирование - это такой момент, который стремится поднять нос аппарата, а момент на пикирование - опускающий нос аппарата.
Очевидно, что при устойчивом положении тангаж не изменяется, а, значит, моменты на пикирование и кабрирование уравновешивают друг друга и сумма их равна нулю. Такое положение соответствует оси х на рис. 1.
Определение статической устойчивости в этом случае: отклонение аппарата по тангажу от сбалансированного положения вызывает возникновение сил, стремящихся вернуть аппарат в прежнее положение.
Проанализируем случай (а) на Рис.1 где точка А находится в равновесии. Давайте рассмотрим влияние возмущения, которое увеличит угол атаки до точки В (например, вертикальный порыв). Так как угол атаки изменится, то момент изменения тангажа не будет равен нулю, и мы сможем увидеть, что точка В не находится в равновесие, так она не лежит на оси Х. Так как наклон кривой в этом случае положительный, это вызовет кабрирующий момент, который увеличит тангаж автожира и увеличение угла атаки. Поэтому случай (а) неустойчивый, так как если возмущение увеличивает угол атаки, то реакция автожира увеличивает это явление.
Напротив, случай (b)устойчив, так как если возмущение увеличит угол атаки до точки B’, то появится пикирующий момент, который уменьшит угол атаки автожира до того момента, когда автожир вернётся в предыдущее устойчивое состояние.
Поэтому статическая устойчивость зависит от наклона кривой относительно оси Х, или другими словами от производной момента тангажа относительно угла атаки. Условие статической устойчивости-производная (угол наклона кривой) должны быть отрицательными.Давайте применим это правило к силам, действующим на автожир.
Четыре основных силы, действующие на автожир и имеющие продольную составляющую:
Тяга маршевого винта
Силы на горизонтальном стабилизаторе (подъемная и сопротивление)
Сопротивление фюзеляжа
Силы на роторе (подъемная и сопротивление)
Чтобы определить, как каждая из этих сил участвует в продольной устойчивости автожира, нам необходимо оценить создаваемые этими силами моменты по тангажу, а также оценить изменение этих моментов. Нам также предстоит определить, где лучше расположить ЦТ аппарата так, чтобы изменение моментов создавало бы восстанавливающий момент.
a) Тяга маршевого винта;
При постоянных оборотах двигателя тяга маршевого винта зависит от скорости автожира, но мало зависит от угла атаки.
Для простоты (это близко к реальности - применительно к автожирам) мы будем считать, что тяга маршевого винта не зависит от угла атаки, т.е. изменение угла атаки маршевого винта не создает новых отклоняющих моментов и не изменяет существующие.
Тогда получается, что тяга маршевого винта сама по себе не влияет на продольную устойчивость АЖ (или, говоря языком физики, система находится в состоянии безразличной устойчивости).
ЦТ аппарата может находиться выше или ниже вектора тяги маршевого винта. Кроме того, ЦТ может располагаться впереди или сзади самого маршевого винта.
К этому моменту мы еще вернемся позже.
b) Горизонтальный хвостовой стабилизатор:
Хорошо известно, что стабилизатор должен располагаться в хвосте аппарата. Это нетрудно проверить, изобразив графически, какие силы возникают на стабилизаторе при изменении тангажа. Если стабилизатор расположен впереди ЦТ, то отклонение от нейтрального положения в любую сторону создаст на нем силу, еще более отклоняющую аппарат от нейтрального положения. Напротив, стабилизатор, расположенный позади ЦТ, при любом отклонении аппарата от нейтрали, создает силу, стремящуюся вернуть аппарат к прежнему положению.
Таким образом, стабилизатор увеличивает устойчивость аппарата.
Эффективность стабилизатора тем больше, чем больше расстояние от него до ЦТ, и чем больше сила, возникающая на стабилизаторе.
Достигнуть увеличения эффективности стабилизатора можно двумя путями: увеличивая расстояние от него до ЦТ и увеличивая его площадь.
Важно заметить, что эффективность стабилизатора прямо пропорциональна углу атаки и пропорциональна квадрату скорости воздушного потока. Таким образом, размещение стабилизатора в потоке воздуха от маршевого винта дает больший эффект, что особенно важно для автожиров, т.к. скорости их полета не очень высоки.
c) Сопротивление фюзеляжа:
Это аэродинамическая сила. Как и для стабилизатора, сопротивление фюзеляжа будет создавать восстанавливающий момент только в том случае, если фокус сопротивления фюзеляжа будет расположен позади ЦТ аппарата.
Расчет отклоняющих моментов для фюзеляжа достаточно сложен математически и существенно зависит от углов атаки фюзеляжа. Как показывает опыт, в силу особенностей конструкции автожира с толкающим винтом сопротивление фюзеляжа как правило работает против устойчивости аппарата (и особенно это касается АЖ с кабиной).
d) Полная тяга ротора:
В различных конструкциях АЖ взаимное расположение вектора тяги ротора и ЦТ аппарата может быть различным.
Мы рассмотрим здесь явление, которое называют "неустойчивость ротора по углу атаки", оно хорошо известно вертолетчикам.
Чтобы разобраться в этом явлении, давайте разберем поведение аппарата в случае, когда вектор тяги ротора проходит впереди ЦТ аппарата и позади него. Сейчас мы увидим, что первое расположение является устойчивым, а второе - нет.
Рис.2 показывает взаимное расположение сил в случае, когда ЦТ находится позади вектора полной тяги ротора. Вектор (a) показывает положение в установившемся полете.
Предположим, что порыв встречного ветра увеличивает угол атаки.
Увеличение угла атаки ротора увеличит его тягу. Оно также увеличит разницу в подъемной силе набегающей и отступающей лопастей, что в свою очередь увеличит циклический взмах лопастей. Поскольку тяга ротора в первом приближении перпендикулярна плоскости вращения ротора, увеличение взмаха отклонит вектор тяги ротора назад (вектор (b) на рис.2.
Теперь посмотрим, каковы последствия изменения момента ротора по тангажу?
Поскольку ЦТ находится позади линии вектора тяги ротора, тяга ротора дает момент на кабрирование (нос тянет вверх). Увеличение тяги ротора увеличит этот момент. Отклонение ротора назад к тому же увеличит плечо тяги ротора относительно ЦТ, что еще больше увеличит дестабилизирующий момент. Оба этих фактора действуют в одном направлении: при увеличении угла атаки дестабилизирующий момент увеличивается.
Следовательно, изменение момента в зависимости при изменении угла атаки в данной конфигурации еще больше изменяет угол атаки. Данная конфигурация, таким образом, является неустойчивой.
Подведем итог для случая, когда ЦТ расположен позади вектора полной тяги ротора:
Увеличение угла атаки вызывает увеличение тяги и махового движения, что вызывает увеличение момента на кабрирование, что еще более увеличивает угол атаки. Т.е. состояние системы - неустойчивое.
Теперь рассмотрим конфигурацию, когда ЦТ расположен впереди вектора полной тяги ротора (рис.3). В этом случае ротор создает момент на пикирование.
Когда порыв увеличивает угол атаки реакция ротора будет такой как описано выше. Мы имеем увеличение тяги ротора. Оно также увеличит разницу в подъемной силе набегающей и отступающей лопастей, что в свою очередь увеличит циклический взмах лопастей.
Но сейчас рассмотрим эффект момента тангажа.
Увеличение подъёмной силы увеличит абсолютную величину момента. Преобладать будет пикирующий момент. Так как момент пикирующий (отрицательный), он будет уменьшать дестабилизирующий момент.
Угол циклического махового движения уменьшит плечо своего момента (как показано на Рис.3) и затем уменьшит абсолютную величину своего момента. Тем временем эти два явления не действуют в одном направлении, но это демонстрирует, что изменение подъёмной силы (тяги ротора) наиболее важно. Таким образом, увеличение угла атаки будет уменьшать дестабилизирующий момент. Производная поэтому отрицательная и данная конфигурация устойчива.
Подведем итог для случая, когда ЦТ расположен впереди вектора полной тяги ротора:
Увеличение угла атаки вызывает увеличение тяги и махового движения, что вызывает уменьшение момента на пикирование, что уменьшает угол атаки. Т.е. состояние системы - устойчивое.
Следовательно, условие устойчивости для ротора заключается в том, что его момент изменения тангажа должен быть строго отрицательным (пикирующим). Более того устойчивость увеличивается, когда этот момент уменьшается.
Тяга ротора (подъёмная сила ротора) является основной силой действующей на автожир и величина её производной также одна из наибольших. Поэтому, каждый может легко понять, что горизонтальное положение Ц.Т. относительно линии тяги ротора (подъёмной силы ротора) чрезвычайно важно.
Следующий вопрос, как мы можем спроектировать автожир, чтобы момент, возникающий на роторе, был отрицательным.
Мы увидим, что применение этого условия предписывает правило по вертикальному размещению Ц.Т. относительно вектора тяги маршевого пропеллера и причину выхода из равновесия.
Давайте предположим, для простоты, что автожир не имеет горизонтального стабилизатора и момент возникающий от силы сопротивления фюзеляжа незначительный (мы вернемся к этому утверждению позднее). Следовательно только две силы действуют на автожир: тяга маршевого винта и тяга ротора (подъёмная сила ротора)
Давайте рассмотрим Рис.4, где Ц.Т. ниже вектора тяги маршевого пропеллера, как большинство автожиров Бенсена и производных от него(низкопрофильный автожир)
Мы можем видеть на этом рисунке, что тяга двигателя вызывает пикирующий момент.
Чтобы быть в состояние равновесия, ротор должен создавать кабрирующий момент и для этого Ц.Т. должен быть позади вектора тяги ротора (подъёмной силы ротора) Таким образом такой автожир неустойчив по углу атаки.
Напротив, если Ц.Т. расположен выше вектора тяги от маршевого пропеллера, как показано на Рис.5, то момент возникающий от двигателя - это кабрирующий момент и чтобы уравновесить автожир, его ротор должен создавать пикирующий момент. Для этого Ц.Т. должен быть впереди вектора тяги ротора (подъёмной силы ротора). Такой автожир устойчив по углу атаки.
Такая конфигурация получила название "высокопрофильной" или "с центральным вектором тяги". Вектор тяги маршевого винта здесь проходит близко от ЦТ и чуть ниже его.
Летные характеристики таких АЖ отличаются от традиционных "низкопрофильных" машин.
По сравнению с низкопрофильными автожирами, этот тип автожира имеет хороший ответ на изменение сектора газа. Когда вы увеличиваете газ, возникает кабрирующий момент, затем увеличивается тангаж, что является ответом на ваше желание увеличить высоту. Простой вывод может быть сделан, когда вы уменьшаете тягу двигателя.
Высокопрофильный автожир менее опасен в случае отказа двигателя и лётные испытания подтвердили это. При отказе двигателя на низкопрофильном автожире, вы должны быстро двинуть ручку управления вперёд, чтобы не потерять скорость и перевести машину на снижение. На высокопрофильном автожире исчезновение кабрирующего момента от двигателя вызовет естественный перевод машины на снижение. Вы только должны удерживать ручку управления мягко.
В наших предыдущих рассуждениях, чтобы рассмотреть устойчивость мы пренебрегли силой сопротивления фюзеляжа. Оценка этого момента зависит от вертикального положения центра сопротивления относительно Ц.Т. Обычно, тенденция такого момента быть пикирующим и дестабилизирующим, как мы отметили раньше. По существу этот пикирующий момент уменьшает устойчивость, для балансировки необходимо увеличение момента ротора. Это явление усугубляется на больших скоростях. Чтобы нейтрализовать его, мы должны добавить горизонтальный стабилизатор с отрицательным первоначальным углом атаки так, чтобы кабрирующий момент от стабилизатора увеличивался при увеличение воздушной скорости. Стабилизатор будет компенсировать пикирующий момент от сопротивления фюзеляжа и это улучшит устойчивость.Теперь, какая связь существует между сказанным выше и явлениями PIO и PPO?
Термин PIO лично мне не очень нравится потому, что он подразумевает, что пилот является его основной причиной, а от машины это как бы не зависит. Это неверно. Пилот является составной частью явления, но не менее важной частью PIO является конструкция аппарата с точки зрения продольной устойчивости. Поскольку возникновение PIO подразумевает изначально недостаточную продольную устойчивость той или иной модели автожира, то стоит значительную часть ответственности за опасность PIO возложить на конструктора! С этой точки зрения конструктор высокопрофильного АЖ с эффективным стабилизатором свою часть ответственности за возможность PIO снижает до минимума.
Теперь хотелось бы сказать несколько слов о PPO.
PPO имеет иной характер, нежели PIO. Аппарат, более подверженный продольной раскачке, тем не менее, может пилотироваться довольно хорошо при наличии опыта. PPO может произойти внезапно и без предупреждения при полете в условиях сильной турбулентности. То, что кувырок происходит без предупреждения, делает это явление гораздо более опасным.
При попадании на низкопрофильной машине без стабилизатора в сильный нисходящий поток, ротор мгновенно разгружается. При разгрузке ротора исчезает не только подъемная сила, но и сила сопротивления ротора, а сохранившаяся тяга маршевого винта, оставшись без противовеса в виде Сх ротора, создает сильный момент на пикирование, переворачивая аппарат носом вниз.
Можно без труда рассчитать время, которое понадобится, чтобы АЖ сделал кувырок вперед и оказался вверх ногами. Пусть ЦТ находится на 25 см ниже линии вектора тяги маршевого винта, АЖ весит 150 кг, а тяга винта равна 90 кг. Чтобы полностью разгрузить ротор, такой АЖ должен, например, попасть в нисходящий поток, имеющий скорость падения воздуха порядка 12 м/сек. Это сильный порыв, но такие все же бывают.
Если пилот не среагирует мгновенно, полностью сбросив газ, то при полной разгрузке ротора такой автожир совершит кувырок вперед меньше, чем за секунду! Теперь понятно, насколько опасна такая ситуация?
Что можно сделать, чтобы избежать этого ?
Во-первых, необходимо добавить горизонтальный стабилизатор. При воздействии нисходящего порыва стабилизатор создает момент на кабрирование, предотвращая кувырок.
Во-вторых, необходимо избегать такого расположения вектора тяги маршевого винта, которое создавало бы момент на пикирование при разгрузке ротора. Для этого вектор тяги винта должен проходить немного ниже ЦТ, создавая момент на кабрирование. В этом случае увеличение угла атаки вновь загрузит ротор.
Решения, помогающие избегать PPO те же самые, что и для избежания PIO. Это приятно, а могло ведь быть и иначе.
В заключение несколько слов о конструкции АЖ с толкающим винтом.
Я полагаю, что:
-
Низкопрофильные АЖ без горизонтального стабилизатора более подвержены PIO в силу недостатка продольной устойчивости и ОПАСНЫ с точки зрения попадания в PPO. Такие АЖ не должны летать в турбулентности и на больших скоростях. Лично я считаю, что на таких АЖ вообще не следует летать!
-
Низкопрофильные АЖ с правильным горизонтальным стабилизатором не являются лучшими, но это уже все же лучше. Под правильным я подразумеваю стабилизатор достаточной площади, имеющий нормальный аэродинамический профиль. По возможности его следует располагать в обдуве маршевым винтом, обеспечивая максимальную эффективность.
-
Высокопрофильные АЖ с правильным стабилизатором являются лучшим решением. Они наименее подвержены PIO и вообще не подвержены PPO.
Всегда есть возможность летать на неустойчивой машине, но не для каждого. Полет на неустойчивой машине даже для очень хорошего пилота всегда опаснее, чем полет на машине устойчивой.
Выбор - за вами.